









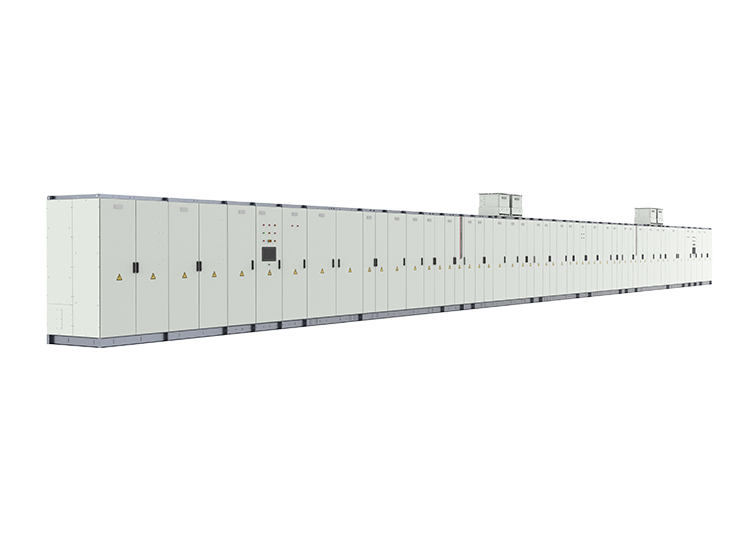
DC1500V Utility Inverter (HSHV506-G01)
PV Grid-Tied Inverter






| HV510 Series High-Performance Inverter | ||
| Input voltage | 380V (-15%) – 480V (+10%)/three phases | |
| Input power supply frequency | (50Hz/60Hz) ±5% | |
| Input voltage imbalance | ≤ 3% | |
| Output voltage | 0 V to input voltage | |
| Output frequency | 0 Hz–1,500Hz | |
| Motor type | Asynchronous motor, permanent magnet synchronous motor | |
| Control mode | V/F, OLVC (open-loop vector control), CLVC (closed-loop vector control) | |
| Speed range | 1:100 for V/F; 1:200 for OLVC; 1:1000 for CLVC | |
| Startup torque | VF: 100% (0.5Hz); OLVC: 150% (0.25Hz); CLVC: 200% (0Hz) | |
| Torque precision | ±5% (OLVC, above 5Hz), ±3% (CLVC) | |
| Torque ripple | ≤ ±5% under vector control | |
| Speed stabilizing precision | OLVC: 0.2%; CLVC: 0.01% | |
| Torque response | ≤ 5 ms under vector control | |
| Acceleration and deceleration time | 0.0s–3200.0s; 0.0min–3200.0 min | |
| Torque boost | 0.0%–30.0% | |
| Overload capacity | Heavy load application: 150% for 1min/5min, 200% for 3 s/5min Light load application: 110% for 1min/5min, 150% for 10 s/5min | |
| V/F curves | Straight-line type, multi-point type, V/F half separation mode, V/F complete separation mode | |
| Input frequency resolution | Digital setting : 0.01Hz ; analog setting : maximum frequency ×0.025% | |
| Acceleration and deceleration curves | Straight-line and S-curve acceleration and deceleration modes with four types of acceleration and deceleration time and one type of emergency stop deceleration time | |
| Jog control | In some applications, the inverter can run briefly at low speed to test the condition of the equipment | |
| Torque control | Torque control supported during vector control | |
| Simple PLC and multi-segment speed | 16-segment speed operation via control terminals | |
| Built-in PID | Easy implementation of closed-loop process control systems | |
| Virtual IO | 8 groups of virtual VDI/VDO, 3 groups of AI as DI, enabling simple logic control | |
| Overvoltage and overcurrent stall control | Automatic limitation of current and voltage during operation to prevent frequent tripping due to overcurrent or overvoltage | |
| DC braking | Startup DC braking and shutdown DC braking | |
| Pre-excitation | When the inverter starts up, pre-excitation of the motor establishes a magnetic field inside the motor that can effectively improve the torque characteristics of the motor during startup | |
| Overexcitation | This can effectively inhibit the rise of bus voltage during deceleration to avoid frequent overvoltage alerts, and enable quick stop upon power failure | |
| Speed tracking | Speed tracking is supported for both asynchronous and synchronous motors and for both vector control and V/F control | |
| Protection functions | Overvoltage suppression, undervoltage suppression, V/F overcurrent suppression, short to ground, phase loss, detection of excessive speed deviation, overvoltage, overcurrent, undervoltage, overload, over-heating, startup, bus undervoltage, bus overvoltage, etc | |
Business E-mail:
Globalsupport@hopewind.com
Service E-mail:
Globalservice@hopewind.com







 English
English 中文
中文 Français
Français Deutsch
Deutsch 한국어
한국어 Nederlands
Nederlands Polski
Polski Português(BR)
Português(BR) Pусск(KZ)
Pусск(KZ) Türkçe
Türkçe